 Linuxeden开源社区
Linuxeden开源社区
1. 源自“简单、唯美”的设计理念
诞生于2006年的RT-Thread,最初源于对当时小型RTOS现状的诸多不满。最令人印象深刻的是彼时不同RTOS混乱的命名风格——如果那个时候有一份类似Linux/Unix风格的小型RTOS,也许就没有现在的RT-Thread了。细想起来,正是这一想法成为了RT-Thread创作的一个重要契机。
长期浸润于开源社区,我早已经习惯了Linux/Unix的风格:编程时几乎都以小写命名、以下划线来连接不同的单词——直到现在,我依然认为只有这样的代码阅读起来才谈得上舒服——相信很多人会有类似的感受吧。真正开始动手后,RT-Thread试图遵循更多Linux/Unix优雅、明快的风格——从划分清模块开始,一点一点理清模块、梳理命名——力图保持“程序的简洁”和“脉络的清晰”:小到变量、函数,大到源文件、模块无一不遵守统一的风格。
只做一件事情,并把它做好,而不逾越雷池一步——Do one thing and do it well. 这也是人们常说的“简单、唯美”。这逐渐形成了RT-Thread的设计理念,RT-Thread要做一个精致而优雅的操作系统。
2. 从“0.3”到 “2.1.0”
2010.04.17 0.3.0版本
因为开源理念早就扎根于心,期待同类开发者们更多的分享、交流,所以很早的时候RT-Thread就以社区化、开放方式推进。下面的框图就是当时放于Goolge Code上发布的第一个版本:RT-Thread 0.3.0。后续由于Google Code关闭,转而放到github,持续到现在(国内是放在OSChina的码云上)。
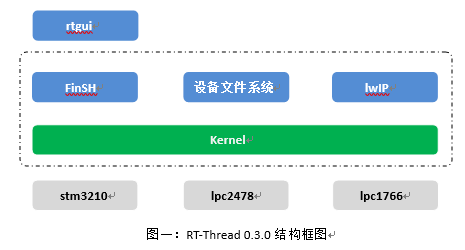
图一:RT-Thread 0.3.0 结构框图
0.3.0版是基础设施的搭建阶段:内核、文件系统、网络协议栈和命令行环境的雏形在这个时候已初具端倪。
2011.12.31 1.0.0 ~ 1.2.0版本
紧接着0.3.0版的发布,0.4.0版的开发几乎立即就开始了。当时我们基本保持着一个稳定版本,新特性完全冻结,以bug修正为主;另一个版本,以添加新功能,向着下一个方向推进的方式进行。通过这样的方式可以快速推进、迭代,同时也不失稳定性及后向的兼容性。在0.4.0版本经过数个版本迭代,成为正式版之际,我们宣布发布RT-Thread 1.0.0正式版本。1.0.0正式版本也意味着:RT-Thread不光具备一个嵌入式实时操作系统所必需的全部基本功能,它的稳定性也达到了商用级别。
随着RT-Thread支持的芯片和平台越来越多,如何有效组织工程变成了一个非常棘手的问题。大多数做法是使用Makefile,但对于不同的桌面开发平台,Makefile表现得并不那么友好(例如Windows平台),同时Makefile变化多样、晦涩难懂的语义也导致掌握它有一定门槛。这个时候使用Python语言实现的scons工具进入到我们的视野中来。从服务开发者角度出发,最终基于scons搭建的RT-Thread构建系统不仅提供了Windows、Linux和MAC下统一的用户体验,同时也针对不同集成开发环境(IDE)按照配置情况,生成对应的工程文件,这样开发者可以选择最习惯,最顺手的集成开发环境。
应该说RT-Thread 1.x系列已经是一个相对成熟的嵌入式实时操作系统。在一个系统平台上开发代码,另外一个必须要考虑的是软件代码的可维护性。简单、松耦合的设计是软件代码可维护性的一方面,而另一方面是跨平台的软件代码可维护性。如果为了实现一样或相类似的功能,针对Linux、RTOS分别要维护两个版本,这个工作量几乎要翻倍了。
在最初设计时,针对文件系统、网络协议栈,RT-Thread都希望用最标准、开放的方式提供API服务接口,甚至是RT-Thread也支持了完整的PThreads接口,使得POSIX 线程和RT-Thread 线程得以无缝结合,用户不再需要为他的代码额外维护另外一个版本。
抽象外设驱动,形成简单、独立模块。一份BSP移植主要的工作是两个方面,芯片架构移植和外设支持。在RT-Thread逐步的演进过程中,发现当更换芯片时,大部分外设驱动有很大一部分代码是一样的。例如针对串口,基本上都会有一份软件上的环形缓冲区(RingBuffer)。这个时候把这些公共的部分提取出来,抽象封装形成一份面向设备的驱动,而驱动底层则只需要简单地实现芯片具体相关的操作接口(ops)就可以了。Device Drivers组件就是这样逐渐演变出来的,到目前已经包括串口,网口,IIC,SPI,RTC,WDT,Audio,USB等一系列的抽象设备模型,为方便支持不同的芯片、板卡节省下大量的时间。
2015.02.02 2.0.0 ~ 2.1.0版本
在嵌入式市场中,实时Linux是很早的一支。但因为Linux天生架构的问题,要想获得高实时性并没那么容易,或者说Linux本身这套架构并不适合高实时性应用。另外市场上多核处理器(SMP对称处理器或AMP异构处理器)也逐渐应用到嵌入式系统领域。
在这个背景下,RT-Thread也在探索如何让RT-Thread成为Linux的有益补充。基于RT-Thread自身简单、独立的设计考虑,RT-Thread实现了支持双操作系统协同工作的虚拟总线组件(VBUS),能够让双方进行相互的数据通信,而并不会把一些实时性问题和Linux纠缠在一起。
追求更好的设计,重构,甚至推翻重新设计。随着智能机的普及,用户的操作体验已然不是键盘/鼠标式的PC风格所能满足,更多的是以轻触,滑动,拖拽,缩放等为代表的触控方式。与之对应,嵌入式GUI技术出现了翻天覆地的变化,而RT-Thread原有的以C语言模拟面向对象技术进行开发的rtgui在代码简洁性、可读性和实用性上也难以满足需求——简单来说,由触控GUI带来的面向对象需求,虽然使用C语言能够实现,但太过繁琐、复杂,和我们一直以来追求的简洁之美背道而驰。思考再三,我们决定依照现代化GUI风格重写GUI组件,以C++为基础,支持多点触摸,提供类似signal/slot信号槽的使用方式,包括各种动画特效等……这一支持界面动画效果的全新GUI,我们称之为柿饼(Persimmon)。
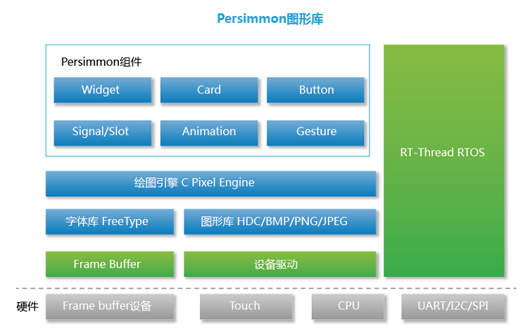
图二:Persimmon结构框图
简单,唯美”,搭建高可伸缩性系统
从0.3.0到2.1.0,都是建立在“简单、唯美”的设计理念基础之上。再配合scons构建工具,从而让RT-Thread成为一个高可伸缩性的系统:最小可以到2.5KB ROM,1KB RAM的nano系统;也可无缝延伸到功能丰富的,针对ARM9、ARM11、MIPS32等处理器,具备现代GUI风格,或多媒体功能的全功能版本。
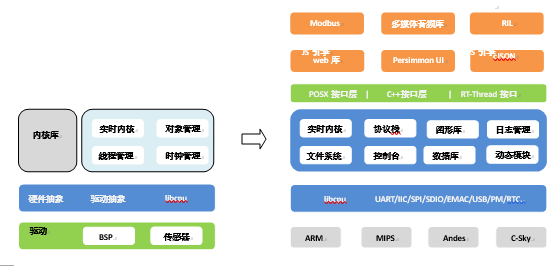
图三:从小型系统到全功能系
3. IoT,RT-Thread 3.0
回顾以往的版本,设计一套类似Linux/Unix优雅风格的轻型、可裁剪系统一直是RT-Thread的目标。能够以开源、自由方式在嵌入式系统领域,或者说在Linux和RT-Thread系统之间自由穿梭,自由翱翔……这种感觉非常美妙。
随着万物互联概念的普及,物联网从最初的概念兴起,逐步走到今天的大规模实现和部署阶段,原有的嵌入式系统不再是孤立的系统,将形成一个有机的、联动的整体。这个大背景下, RT-Thread依然沿着自己的理念向着万物互联的IoT大步迈进,我们在RT-Thread的演进过程中不断融合物联网终端系统的新特征和新需求,终于迎来了第一个全新物联网版本的推出, RT-Thread 3.0!针对物联网终端的高度碎片化和低资源占用要求,我们引入专门的配置工具,实现系统的高度可裁剪可定制;基于物联网的多样化通讯和连接方式,我们优化并支持丰富的网络协议和无线连接如WiFi、NB-IoT等。诸如此类,众多优秀新功能的加入使得3.0版本成为物联网芯片的理想选择!
转自 http://www.oschina.net/news/88665/rt-thread-founder-talk-about-rt-thread